|
| 写真:窓を登るAu |
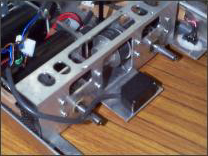
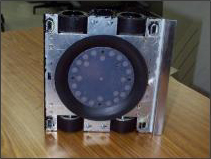
今年一番の研究成果はタイヤである。浮き土俵でも空転することなく動きの取れるタイヤについて研究した。この研究によって浮き土俵に負けないタイヤを作ることができた。大会ではその力が十分発揮された。 シャーシは、折り曲げ加工したことによって吸着時の歪みが無くなり、タイヤへの接地圧が更に増加した。縦の歪みについては、ギアボックスによって解消した。 この吸盤とポンプは人の手で引っ張っても取れないほどの力を持っている。そのため、壁に付けても落ちることなく、そのまま移動することができる。このことは、相手に押し出されにくくする「防御」とタイヤに接地圧を与えることで、高い推進力を得る「攻撃」の働きをもつことを意味する。
装甲は、相手の赤外線センサで発見されることなく相手の横に忍び寄る効果をもっている。大会では、このステルス効果を確認できる場面があった。ただし、超音波センサを搭載したロボットに対しては、効果はないと考えられる。
高出力モータを2個使用して、ギアボックスにより四輪駆動を実現した。この組合せは、力強い押しを生み出したが、予想以上の過電流によって電気ケーブルが焼損する場面があった。
|






 岡谷工業高校電気工学クラブは、このほど開かれた県内の工業系高校などによる「第8回ロボコンIN信州」の自立型相撲ロボットの部で、3年連続優勝を果たした。同クラブは一ヵ月後に迫った全国大会などに向け、さらにロボットの強化を進めている。
岡谷工業高校電気工学クラブは、このほど開かれた県内の工業系高校などによる「第8回ロボコンIN信州」の自立型相撲ロボットの部で、3年連続優勝を果たした。同クラブは一ヵ月後に迫った全国大会などに向け、さらにロボットの強化を進めている。